Первые шаги четвероногого робота Pneupard (видео)
")
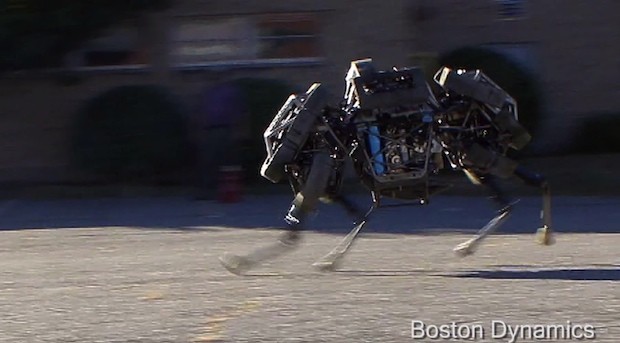
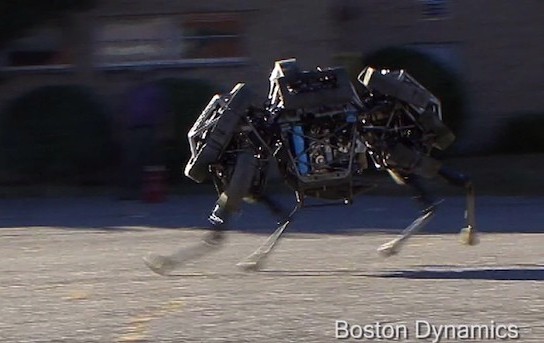
Ученые из японского Osaka University, вдохновленные примером робота-кота Wildcat от Boston Dynamics, начали работу над собственным четвероногим роботом. В конструкции было решено использовать ограниченное количество пневматических мышц. Это позволило немного упростить систему управления, без ущерба качеству походки. Правильная координация и устойчивость достигается в значительной степени особой структурой скелета. На демонстрационном ролике можно видеть, что робот действительно двигается мягко и уверенно, но при этом пока он использует боковую поддержку.
Источник: 24GADGET.RU
💬 Комментарии
В связи с новыми требованиями законодательства РФ (ФЗ-152, ФЗ «О рекламе») и ужесточением контроля со стороны РКН, мы отключили систему комментариев на сайте.
🔒 Важно Теперь мы не собираем и не храним ваши персональные данные — даже если очень захотим.
💡 Хотите обсудить материал?
Присоединяйтесь к нашему Telegram-каналу:
https://t.me/blogssmartzНажмите кнопку ниже — и вы сразу попадёте в чат с комментариями